GeoPIV-RG
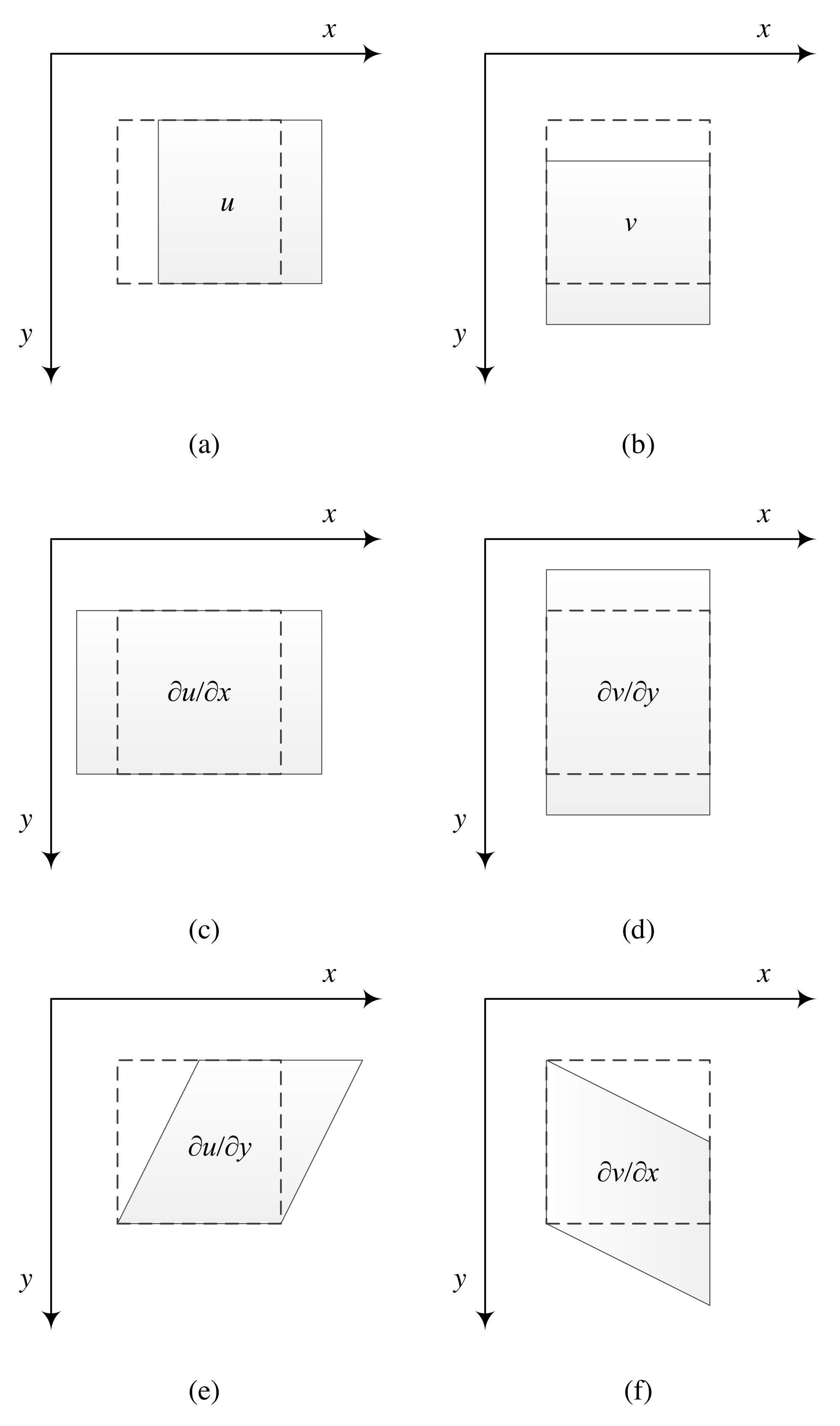
GeoPIV-RG is an image-based deformation measurement freeware package developed in Matlab. The package is described and benchmarked in a paper that won the 2020 CGS Fredlund Award (Stanier et al., 2015). The Inverse-Compositional Gauss-Newton algorithm GeoPIV-RG is built upon facilitates a first-order subset deformation (i.e. constant strain, as illustrated in the figure below) enabled by bi-quintic b-spline image intensity interpolation techniques.
An automatic reference image updating scheme based on comparing the minimum full-field correlation coefficient and a user defined criteria is adopted to minimise random walk errors, as illustrated below. This strategy minimises: (i) the effect of de-correlation resulting from excessive subset deformation caused by too infrequent reference image updates; and (ii) the random walk errors induced by updating the reference image too frequently. In the previous incarnation of the code, GeoPIV, this balance had to be identified manually, which was problematic for problems where the deformation developed in an irregular manner.
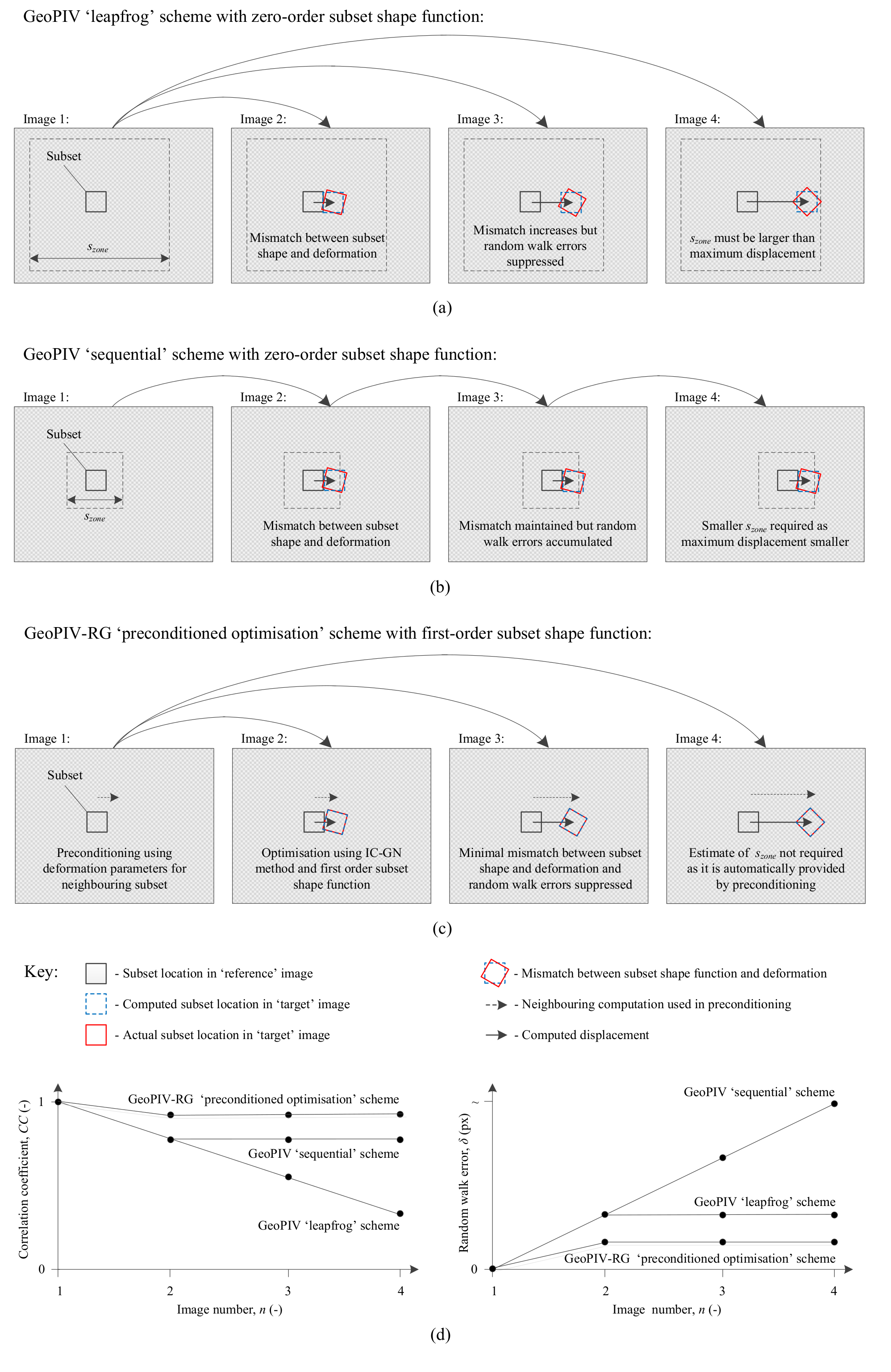
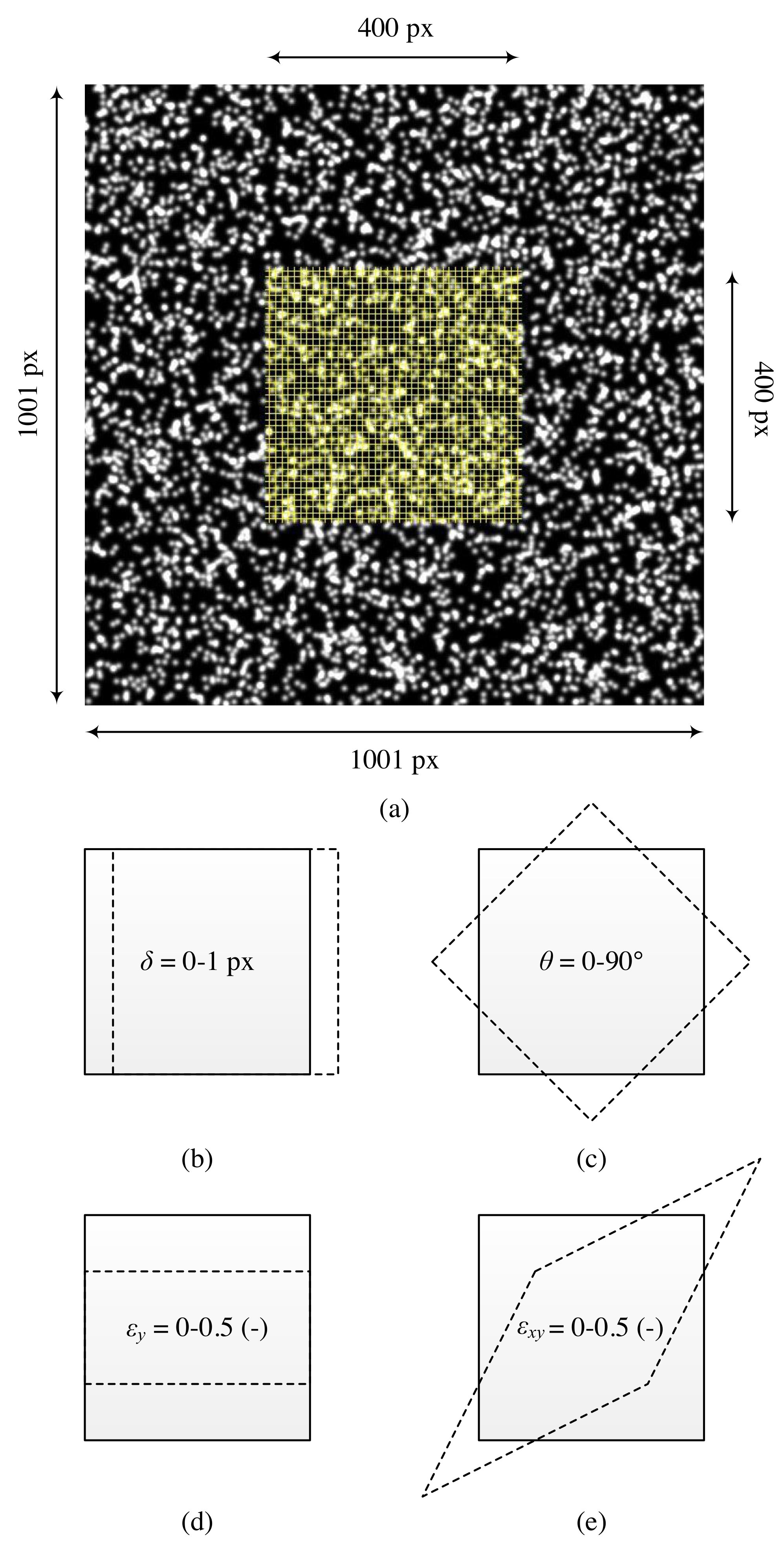
This combination results in an at least an order of magnitude improvement in measurement precision for sub-pixel displacement, rotation, compression and shear strain. This results in significant improvement of measurement precision in the analysis of boundary value problems, such as jack-up foundation punch-through as shown below:
To download GeoPIV-RG go to the following link and head to the download page.